
Рис. 1. Механическая характеристика насоса для различных значений статического напора
 преобразователя частоты VFD")
Рис. 2. Задаваемая зависимость γ(α) преобразователя частоты VFD

Рис. 3. Превышение температуры корпуса электродвигателя

Рис. 4. Зависимость потерь мощности от расхода

Табл. 1. Превышение температуры корпуса электродвигателя при различных значениях противодавления

Табл. 2. Аппроксимация механических характеристик погружного насоса и закон управления напряжением

Табл. 3. Расчет тепловых режимов

Табл. 4. Эффективность применения расчетного закона управления напряжением преобразователя в сравнении с квадратичным
Между тем, центробежные насосы имеют широкое применение в различных областях, в т.ч. отоплении, кондиционировании, более 20 % мирового потребления электроэнергии приходится на долю электродвигателей насосов [1]. Все шире в качестве регулирующей составляющей электропривода применяется преобразователь частоты.
Именно поэтому становится все более актуальной разработка методических основ расчета и проектирования рассматриваемого оборудования, на основе математического эксперимента и моделирования, использующих такие аппараты для оптимизации структуры и параметров оборудования как теория вероятностей и исследование операций. Нельзя согласится с автором упомянутой статьи, что «отсутствуют строгие методики оптимизации энергопотребления и математические модели» — они существуют давно и в этом можно убедиться [2, 3, 4 и др.].
Раньше они не были широко востребованы ввиду недостаточного распространения преобразовательной и компьютерной техники. Тем не менее, надо отдать должное автору и поблагодарить его за первые шаги, положившие начало в освещении научных исследований по этой важной тематике. К сожалению, статья ограничивается лишь общим видом функции механической характеристики насоса и методикой ее построения.
Было бы интересно знать, каким образом автор использует полученные результаты в прикладных целях: для «энергосберегающего пуска… и управления насосным агрегатом при переменной» частоте вращения. Одним из важных моментов математического моделирования энергетических процессов в частотно-регулируемом электронасосе является аналитическое представление механической характеристики центробежного насоса, как нагрузки частотного привода.
Поскольку насос является энергетической машиной, имеющей в свою очередь нагрузку в виде случайного переменного расхода в магистрали со своими параметрами, в т.ч. противодавлением, то учет последних в математических зависимостях момента от частоты вращения рабочего колеса насоса и будет залогом обеспечения принципа взаимосвязанности моделей. Наиболее ярко это проявляется в погружных электронасосах.
Отметим две основные причины. Первая касается режима охлаждения электродвигателя, связанного с уменьшением расхода, вторая — влияния на этот режим противодавления. Рассмотрим подробнее. Частотное регулирование обеспечивает изменение частоты вращения насоса, а следовательно, и переменную его производительность согласно расходу потребления воды от некоторой максимальной величины qmax до минимальной qmin.
Снижение производительности или расхода погружного электронасоса влияет на его тепловые режимы. Охлаждение двигателя осуществляется потоком воды, образующимся между стенкой обсадной трубы скважины и поверхностью двигателя при всасывании ее насосом, и зависит от скорости этого потока [5]. Вместе с тем снижение частоты вращения электронасоса приведет к снижению потерь в электродвигателе, а следовательно, к уменьшению его нагрева [6], что в какой-то степени компенсирует ухудшение охлаждения.
Это объясняется тем, что при работе преобразователя изменение частоты f всегда сопровождается изменением амплитуды выходного напряжения U, между которыми существует взаимосвязь, имеющая термин: «закон управления напряжением». Проведенные исследования [5] влияния частоты питающего напряжения на нагрев электродвигателя погружного насоса для различных условий подтвердили это предположение, например табл. 1, в которой противодавление Нст выражено в относительных единицах.
За базовую величину принято давление насоса Ноп при расходе равном нулю. Функция U(f) задавалась в виде степенной с показателем равным двум. Действительно, при Нст = 0,82 в интервале расходов 3,0–1,0 м3/ч (последний столбец табл. 1) наблюдаем только рост температуры, а при Нст = 0,55 и Нст = 0,28 сначала снижение и потом рост температуры. Температура электродвигателя напрямую зависит от потерь.
Снижение потерь в двигателе является одним из основных вопросов рационального управления частотного привода, заключающимся в оптимальном, по условию минимума потерь, соотношении между амплитудой и частотой напряжения, питающего двигатель в процессе регулирования [6]. В свою очередь, минимум потерь обеспечит энергоэкономный режим двигателя и его допустимый нагрев для безаварийной работы.
Таким образом, ставится задача определить законы управления напряжением для частотного регулирования производительности погружного электронасоса, работающего с противодавлением, для различных значений этого противодавления. Цель — обеспечить снижение затрат электроэнергии и увеличить ресурс электродвигателя. М.П. Костенко установил общий закон оптимального управления напряжением:

Где γ, α, μ — соответственно относительные значения напряжения, частоты и момента на валу двигателя (за базовые величины приняты их номинальные значения). Известно, что для нормальной работы механизма с электроприводом необходимо чтобы механическая характеристика привода μ= f(ω*) соответствовала механической характеристике механизма, где ω* — относительная, приведенная к номинальной, частота вращения привода.
При этом в практических расчетах используют приближенное равенство ω* ≈ α. Поэтому когда нагрузкой двигателя является вентилятор или насос, момент сопротивления которого зависит от частоты вращения в функции квадрата, математическоевыражение механической характеристики можно записать в виде μ= α2, а закон управления напряжением согласно (1) будет иметь вид:
γ= α2. (2)
Иначе дело обстоит, если насос работает с противодавлением. Механическая характеристика при этом будет иметь более сложную функциональную зависимость. Определим ее. Мощность насоса зависит от расхода и определяется следующим выражением:

где q — расход, обеспечиваемый насосом, м3/ч; H(q) = Hст + Zq2 — напорная характеристика магистрали — зависимость давления создаваемого насосом в функции расхода в магистрали с гидравлическим сопротивлением Z, ч2/м5 и статическим напором (противодавлением) Hст, м водн. ст.; ηн(q) — КПД насоса, зависящий от расхода [7]. Обеспечение электронасосом необходимых технологических параметров в магистрали: требуемого в данный момент времени расхода воды q и давления H(q), обусловлено величиной относительной частоты вращения рабочего колеса насоса или привода ω*.
Подразумевается, что изменение производительности насоса происходит при условии стабилизации давления в некоторой точке магистрали. А также параметрами самого насоса: S — коэффициентом гидравлического сопротивления насоса и Hоп — давлением насоса при расходе равном нулю, и параметрами сети Hст и Z. Зависимость, связывающая все эти величины, имеет вид [4]:
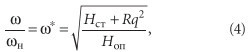
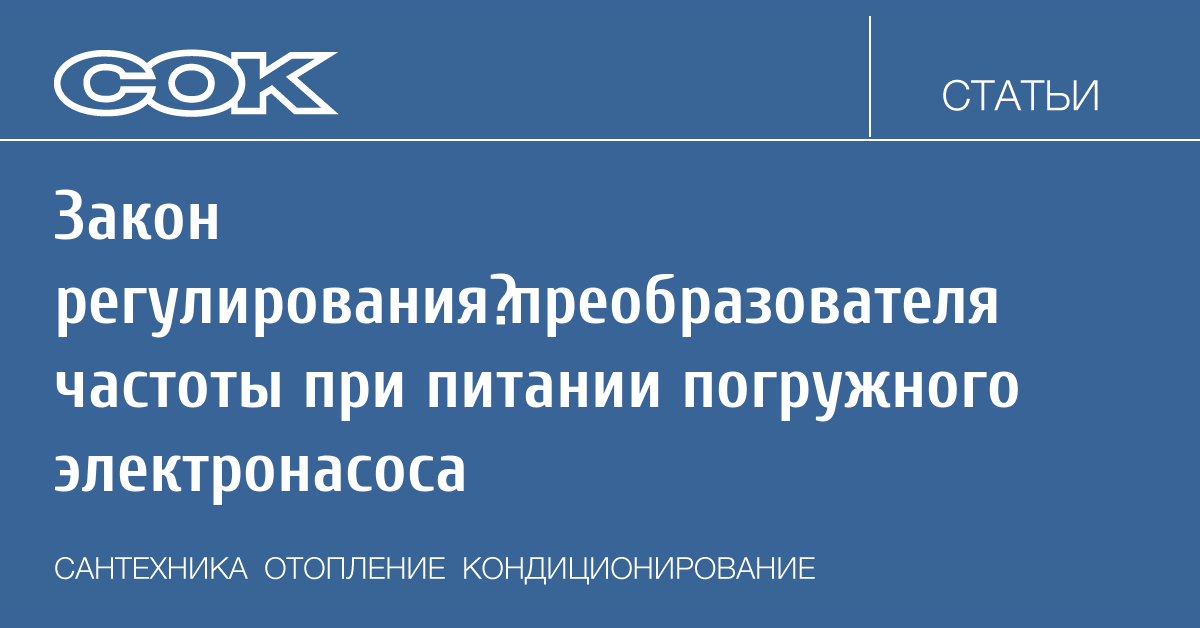
где ω— текущая частота вращения электронасоса; ωн — номинальная частота вращения электронасоса при 50 Гц; R = Z + S — суммарное гидравлическое сопротивление. Используя полученные выражения (3) и (4), находим зависимость момента от частоты вращения в виде:
Более подробно вывод формулы представлен в [8]. Построим механические характеристики для насоса ЭЦВ42,5-65, рис. 1, имеющего следующие параметры: Ноп = 73 м водн. ст.; S = 2,0 ч2/ м5; ωп = 296 с–1; Рп = 1,5 кВт и работающего на магистраль с гидравлическим сопротивлением Z = 2,0 ч2/м5. Значения КПД насоса в функции расхода рассчитаем по формуле, приведенной в [7]. Расчет выполним для трех значений Hст характеристики сети H(q) = Hст при Z = 0, и для характеристики сети H(q) = Zq2 при Hст = 0 в относительных единицах.
За базовую величину принято значение Hоп. Аналогичный результат был получен и в [2], с той лишь разницей, что характеристики там построены из общей точки. Поскольку закон управления по (2) предусматривает управление напряжением, а следовательно, и потоком непрерывно, соответственно изменению нагрузки, можно говорить о прямой пропорциональности напряжения и момента, то есть γ~ μ.
Преобразователи частоты, к примеру типа VFD-F, имеют различные виды настроек закона управления, в том числе выбор и установку четырех зависимостей γ= αn, где n = 1,5; 1,7; 2; 3, а также произвольной зависимости, задаваемой параметрами, указанными на рис. 2. Поскольку произвольная зависимость задается двумя линейными графиками, то имеет смысл представить механические характеристики, рис. 1, прямыми вида μ= bω * + c, табл. 2. Здесь же представлены законы регулирования напряжения, полученные с помощью выражения (1) [8].
Покажем на числовом примере, что управление по закону, учитывающему противодавление, обеспечит меньшую величину потерь по сравнению с управлением по закону (2), а следовательно, и меньший нагрев двигателя. Расчет выполним для погружного двигателя ПЭДВ-1,5-96 по методике [9]. Вычислим значения превышения температуры корпуса двигателя tкор, а также выделяемое количество тепла Qv и коэффициент теплопередачи воде αт для различных значений расходов q, давлений Hст и законов управления напряжением согласно табл. 2. Результаты сведем в табл. 3.
Для сравнения воспользуемся данными для закона управления (2), приведенными в [5]. Построим графики превышения температурыкорпуса и потерь мощности для двух вариантов управления напряжением: по (2) и по выражениям из табл. 2, рис. 3 и 4. Определим эффективность применения законов регулирования с учетом противодавления, рассчитав относительное снижение потерь и превышение температуры корпуса двигателя, табл. 4. Результаты расчетов были проверены экспериментально на стенде в лаборатории водоснабжения ВИЭСХ.
Вывод. Правильный выбор закона управления имеет практическое значение, поскольку позволяет снизить потребляемую электроэнергию, уменьшить нагрев электродвигателя и повысить его ресурс.
